A transformation is represented mathematically as a matrix.
OpenGL maintains a stack of saved transformation matrices.
glPushMatrix() & glPopMatrix() save and restore transformation state.
Make sure you always have the same number of pushes & pops.
The number of transformations you can save is finite; it is at least 32.
Example: pushpop.py
Hierarchical transformations can be thought of as transformations that are "attached to" other transformations.
They are used to transform objects relative to other objects.
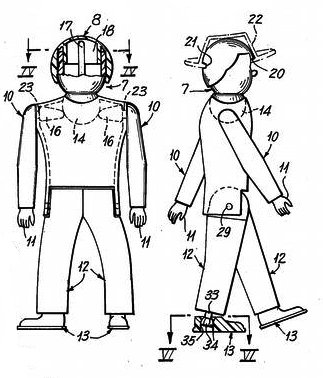
A common use is in articulated bodies.
We can draw this "car" by transforming the two wheels relative to the body of the car.
We'd like each wheel to be affected by the car body's transformation, but not by any other wheel's transformation.
This can be accomplished by saving & restoring transformation state.
apply body transformation draw body save state apply front wheel transformation draw wheel restore saved state apply rear wheel transformation draw wheel
Examples:
Hierarchical transformations are often represented as a tree of transformations.
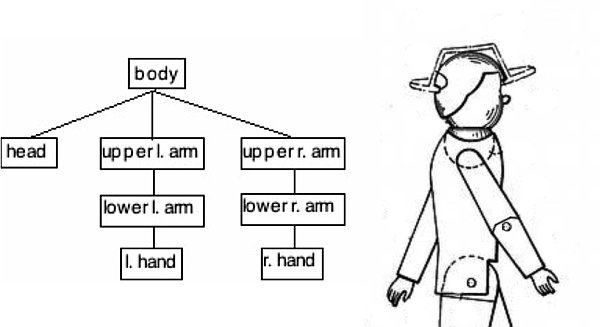
This is the basis of scene graph systems.
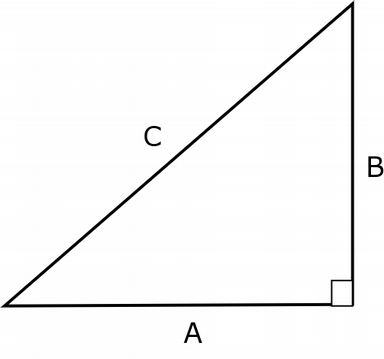
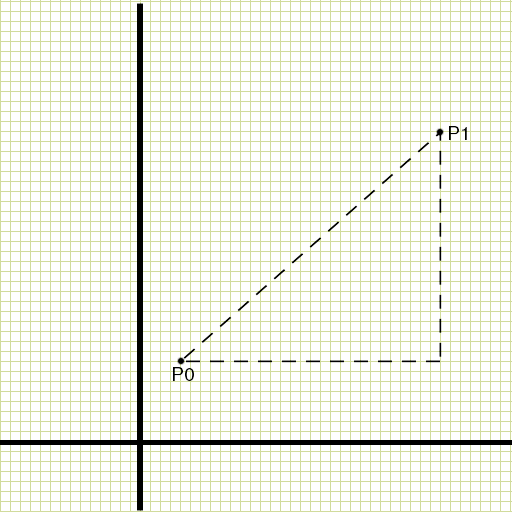
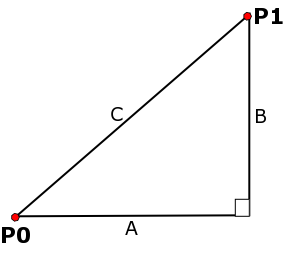
Distance between two points P0 (x0,y0) and P1 (x1,y1):
A = x1 - x0 B = y1 - y0 (x1-x0)*(x1-x0) + (y1-y0)*(y1-y0) = C*C dist = C = sqrt((x1-x0)*(x1-x0) + (y1-y0)*(y1-y0))
Distance between two 3D points P0 (x0,y0,z0) and P1 (x1,y1,z1):
dist = sqrt((x1-x0)*(x1-x0) + (y1-y0)*(y1-y0) + (z1-z0)*(z1-z0))
sqrt is considered an expensive (i.e. slow) function
Avoid using it if you can
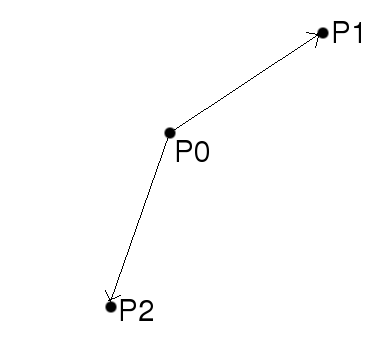
For example, to determine which of 2 points (P1 or P2) is closer to point P0:
dist1 = (x1-x0)*(x1-x0) + (y1-y0)*(y1-y0) + (z1-z0)*(z1-z0)
dist2 = (x2-x0)*(x2-x0) + (y2-y0)*(y2-y0) + (z2-z0)*(z2-z0)
if dist1 < dist2:
P1 is closer
else:
P2 is closer
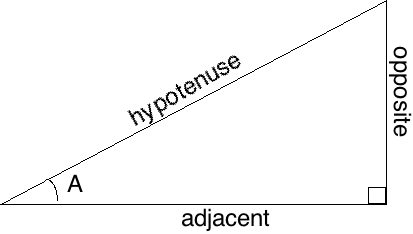
sin(A) = opposite / hypotenuse cos(A) = adjacent / hypotenuse tan(A) = opposite / adjacent
or
opposite = hypotenuse * sin(A) adjacent = hypotenuse * cos(a)
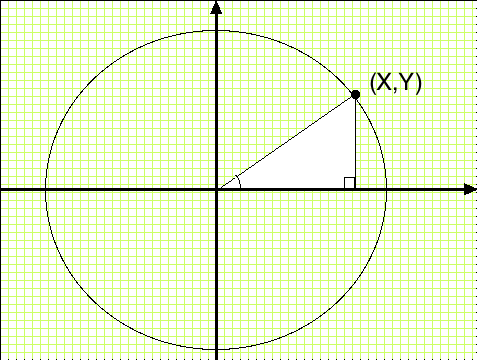
x = radius * cos(A) y = radius * sin(A)
Standard math library functions use radians
360 degrees = 1 full circle = 2 π radians
(Circumference of unit circle = 2 π)
radians = degrees / 360.0 * 2 * pi
or
radians = degrees / 180.0 * pi
(or use Python's pre-defined functions math.radians(d) and math.degrees(r))
glBegin(GL_LINE_LOOP)
for degrees in range(0, 360):
angleInRadians = math.radians(degrees)
x = math.cos(angleInRadians) * radius
y = math.sin(angleInRadians) * radius
glVertex2f(x,y)
glEnd()
Vehicle has direction and speed of travel
Direction is orientation - rotation about Z
To move forward:
distance = speed * time
dx = math.cos(direction) * distance
dy = math.sin(direction) * distance
x = x + dx
y = y + dy
atan2 converts from (X,Y) coordinates back to angles
Note: it takes arguments in the order Y, X
angle = math.degrees( math.atan2(y,x) )
Deriving a value for something from two pre-defined values (extremes)
e.g. Moving object from one position to another, over time
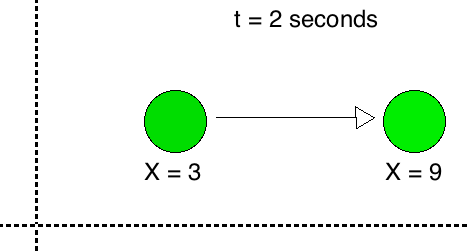
Interpolation expressed as fractional distance between the two extremes
Ranges from 0.0 to 1.0
0.0 = first point; 1.0 = second point
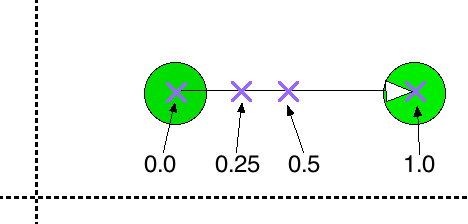
For a single value, with extremes V0 & V1 and interpolation fraction A:
V = (1 - A) * V0 + A * V1
For multiple values, such as XYZ position, use the same fraction A for all:
X = (1 - A) * X0 + A * X1
Y = (1 - A) * Y0 + A * Y1
Z = (1 - A) * Z0 + A * Z1
To interpolate over time, compute interpolation fraction based on the amount of time that has passed.
Example:
def startAnimation():
animating = True
startTime = time.time()
duration = 5
def computeAnimation():
if animating:
t = time.time() - startTime
if t <= duration:
a = t / duration
else:
animating = False
a = 1
x = (1-a)*startX + a*endX
y = (1-a)*startY + a*endY
z = (1-a)*startZ + a*endZ
| Linear | Slow-in Slow-out |
|---|---|
 | 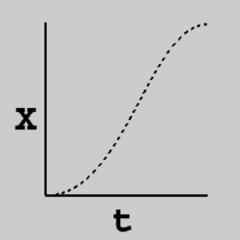 |
| X = t | X = -2*t*t*t + 3*t*t |
A2 = -2*A*A*A + 3*A*A V = (1-A2) * V0 + A2 * V1
Example: interp.py
